|
Rayyan Rafikh I'm a graduate student at Northeastern University in Boston, where I study and research Perception and Planning in Robotics. My academic interests primarily are in the research of Robotic Motion Planning, Perception, Optimization and Autonomy particularly within the captivating domains of Aerospace, Space Exploration, Automobile and Defense. Previously, I earned my bachelor's degree in Mechatronics Engineering at Manipal Institute of Technology. I currently serve as a Graduate Research Assistant at the Dependable Autonomy Lab at Northeastern University, advised by Dr. Derya Aksaray, and as a Graduate Teaching Assistant under Dr. David Rosen and Dr. Derya Aksaray. I swim, run and enjoy playing football and badminton. I love reading, hiking, photography and travelling! Email / Google Scholar / Linkedin / Github / CV |

|
ResearchI'm interested in algorithms for Perception, Localization, Mapping and Control for Autonomous Systems. My research is focused in the areas of Planning for Autonomy in Multi-Agent Systems. |

|
A Scoping Review on Unmanned Aerial Vehicles in Disaster Management: Challenges and Opportunities
Vishnu G. Nair, Jeane Marena D'Souza, Asha C. S., Rayyan Muhammad Rafikh Journal of Robotics and Control, 2024 Paper We explore the transformative role of drones in disaster management, focusing on their use in response and recovery operations for both natural and man-made incidents; and investigate advancements in AI and sensor technology, while addressing key challenges like privacy concerns, regulatory barriers, and ethical dilemmas. |

|
Autonomous Navigation System for Multi-Quadrotor Coordination and Human Detection in Search and Rescue
Vishnu G. Nair, Jeane Marena D'Souza, Rayyan Muhammad Rafikh Journal of Robotics and Mechatronics, 2023 Paper This work focuses on developing a method for simulating life detection during sudden disasters using deep learning models. It also involves coordinating multiple UAVs through region-partitioning techniques to accelerate search and rescue operations, tested in a simulated platform resembling real-life disaster environments. |

|
Simulated Evaluation of Navigation System for Multi-quadrotor Coordination in Search and Rescue
Jeane Marena D'Souza, Rayyan Muhammad Rafikh International Conference on Robotics, Control, Automation and Artificial Intelligence, 2022 Paper This proposes a simulation method for detecting life in sudden disasters using deep learning models, particularly Convolutional Neural Networks. It also involves multi-quadrotor coordination through region-partitioning techniques to enhance the efficiency of search and rescue operations. Additionally, the paper explores other non-conventional methods to further improve disaster response. |
|
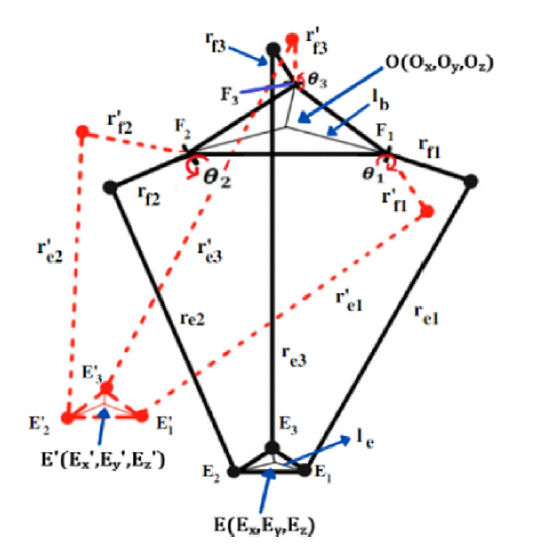
Position error estimation and compensation of 3-DOF delta robot under the effect of link tolerances
Darren Alton Dsouza, Rayyan Muhammad Rafikh, Ankur Jaiswal International Conference on Recent Advances in Modelling and Simulations Techniques in Engineering and Science, 2022 Paper My work investigates position error in a 3-DOF delta robot due to link tolerance. It includes a mathematical formulation of the problem, followed by a comparative analysis of the forward and inverse kinematics to assess the impact on robot performance. |